
DevLog @ 2025.08.26
大家好久不见,我是 @LemonNeko,AIRI 的维护者之一。啊,有点厌倦这样开场了,像 LLM 一样。
我的上一篇 DevLog 中提到,我浅浅地看了一下 Factorio Learning Environment 论文,并且简单说了一下我们打算如何改进 airi-factorio,但是...今天想和大家分享的并不是这个,而是关于纯视觉方向的进展。
在今年六月的时候,@nekomeowww 发布了一个几乎实时的 VLM Playground HuggingFace Spaces,感觉非常的酷,所以我打算先试一下简单的实时图像识别(当时我还把目标检测和图像识别弄混),然后以某种方式交给 AI 去做决策,最后以某种方式输出动作给游戏去执行。
先给大家看一下成果:
视频中,我在网页里连接了 VNC 来游玩 Factorio,右侧的是目标检测的结果,几乎是实时的,我也部署到 HuggingFace Space 了,欢迎来玩。
那,我是怎么做到的呢?
把 Factorio 客户端装进 Docker 里
为了能让 AI 看到游戏画面,我们需要确保 Factorio 运行在可控的环境中,不会受我们的窗口大小、位置等影响,同时,我们也会希望这套环境是可以开箱即用的,所以,我选择把 Factorio 装进 Docker 里。
Factorio 官方提供了 Docker 镜像,但是那是纯服务端,如果想要让 AI 看到画面,让 AI 来控制游戏,我们需要一个客户端,但是没有找到现成的 Docker 镜像(而且 Factorio 的许可协议不允许这样分发客户端),我们需要自己打包了(而且我们也依然不能分发我们打包的客户端镜像,只能分享 Dockerfile 了)。
那把 Factorio 客户端这头大象装进名为 Docker 的冰箱里,一共分几步?
- 下载 Factorio 客户端:当然,它是主角。
- 准备一个虚拟显示器:具有图形界面的应用需要一个显示器才能显示画面嘛。
- 准备 VNC 服务:它可以读取到虚拟显示器的内容,把画面传给外部的 VNC 客户端,同时把用户的输入传给游戏。
好像漏了什么?啊,音频?什么音频?不存在的,现在的 AI 还不会听声音,我们先忽略。
下载 Factorio 客户端
Factorio 官方网站中可以直接点击下载,但是需要手动操作登录,这不方便构建自动化流程,所以,我找了一个下载脚本 factorio-dl 这是一个非常复杂的 shell 脚本,给它提供用户名,密码和要下载的版本,它就会自动根据系统架构下载对应的客户端。
准备一个虚拟显示器
这一步稍微复杂一点,但是它没有像安装一整个桌面环境那么复杂,我也是这时候才知道图形界面程序可以不需要桌面环境,不需要窗口管理器,只要一个最简单的 X 环境和一个显示服务器就可以了。
非常简单:
sudo apt install -y xvfb x11-apps mesa-utils其中:
xvfb是一个虚拟的帧缓冲器和 X 服务器。x11-apps是一些 X 相关的工具,安装它的时候会同时安装 X 环境。mesa-utils是一些 Mesa 相关的工具,Mesa 是 OpenGL 的软件实现,它提供了一些工具来帮助我们测试和调试 OpenGL 程序。
准备 VNC 服务
VNC 是 Virtual Network Computing 的缩写,它是一个远程桌面协议,可以让我们在远程控制另一台计算机,就像我们直接坐在那台计算机前面一样。
sudo apt install -y x11vnc有了这些,我们就可以在 Docker 中运行 Factorio 客户端,用 VNC 来控制它了。
但是这还不够,我的目标是在浏览器中游玩并实时进行目标检测的推理,然而浏览器里只能用 HTTP 协议,所以我们需要用 websockify 这样的工具来将 VNC 协议转换为 HTTP 协议,同时,为了方便 Debug,我们还需要一个 Web 界面来显示 VNC 的画面,所以我们还需要安装 novnc。
sudo apt install -y websockify novnc好,这样一来 Docker 镜像就准备好了,可以在这里看完整的 Dockerfile 和使用说明。
训练目标检测模型
为了快速验证,我直接用 YOLO11n 的预训练模型作为基础来训练我们的目标检测模型。
准备数据集
我是这样收集数据集的:
- 使用
surface.create_entity函数来在场景中随机位置放置机器,和机器的选择框(selection_box)大小和位置。 - 使用
game.take_screenshot以各种缩放比例和光照条件(daytime)来截屏。 - 根据选择框生成标注数据并使用
helpers.write_file来保存到文件里。
我的收集脚本在这里,它使用 typescript-to-lua 来把 TypeScript 编译成 Lua,然后使用 RCON 来传递给 Factorio 执行。
在脚本中,我收集了三个型号的组装机和传送带,每个机器收集了 20 张图片,每张图片 1280x1280 分辨率,没有包含 UI。
哦还有,为了能更好的 Debug 我的收集脚本,我开发了一个 VSCode 插件,它提供了一个 CodeLens 操作,可以一键编译并执行我的脚本。
图片和标注数据都收集好后,我们需要按 YOLO 官方的格式 来组织数据集,然后可以传到 Ultralytics Hub 上来看看效果:
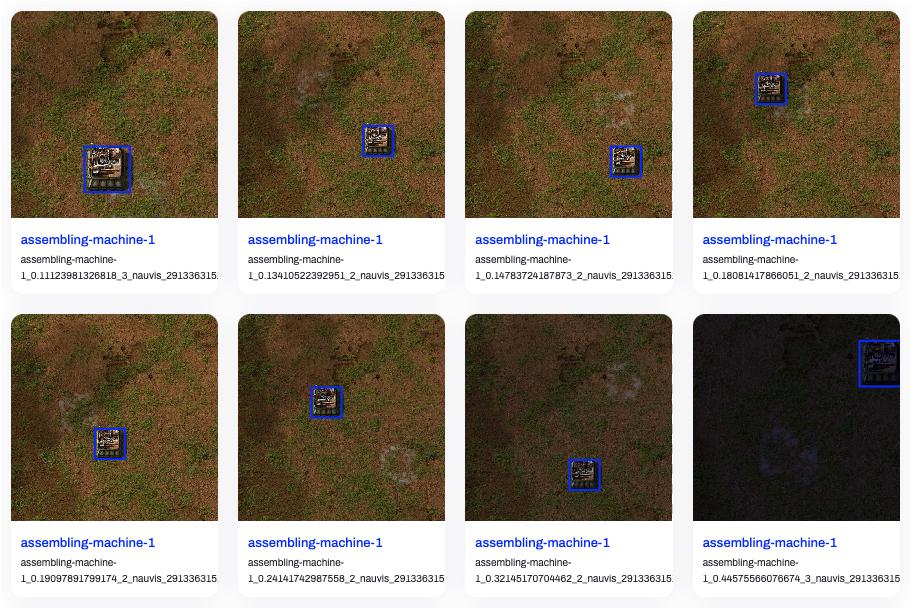
是不是看上去还行?那我们开始训练吧!
训练模型
由于我刚入门,所以我直接从 Get Started 开始,抄来了这几行代码:
from ultralytics import YOLO
model = YOLO("yolo11n.pt")
model.train(data="./dataset/detect.yaml", epochs=100, imgsz=640, device="mps")
model.export(format="onnx")以 640x640 的分辨率,使用 MPS 设备(在 macOS 上,使用 MPS 设备可以获得更好的性能),训练了 100 个 epoch,每个 epoch 有 5 个 batch,大概在 70 epoch 时达到最佳效果,导出了 ONNX 模型。训练耗时大约 8 分钟,模型大小约为 10MB。
可以在 这里 看到数据集、训练代码和导出的 ONNX 模型。
进行推理
现在可以把以上两个零件组装起来了,我用了:
@novnc/novnc来在浏览器中显示 VNC 画面,同时把画布的数据拿出来喂给模型。onnxruntime-web来在浏览器中进行推理,它提供了 WebGPU 的支持,可以利用 GPU 的性能。
一开始,推理速度非常慢,大概 400ms 左右,而且会卡死 UI,连 VNC 都没法好好显示了,我临时学了点 WebWorker 的使用方法,把推理和显示分开,才解决了这个问题,并且我发现我并没有真的启用 WebGPU,所以速度还是慢。
ort.InferenceSession.create(model, { executionProviders: ['webgpu', 'wasm'] })要写清楚允许使用 WebGPU 和 WASM 两种执行方式,这样可以在 WebGPU 不可用时,自动切换到 WASM 执行。
在启用 WebGPU 之后,推理速度提升到了 80ms 左右,我还是嫌慢,但是我又不知道该怎么继续优化下去了,这时候 Cursor 和我说:「你在像素颜色值归一化的时候,一直在除以 255,你应该先把 1/255 算出来,然后直接乘以这个值,这样就可以避免除法了」。
嗯?等一下,原来除法比乘法慢吗?果然跳过的计算机科学课还是得补回来。
按照 Cursor 的建议,我改了下代码,推理速度提升到了 20ms 左右,体验已经非常不错了。
我们刚刚跳过了处理模型输出的部分,现在我们来看看怎么处理模型输出。
处理模型输出
模型输出了一个 84000 个元素的数组,和 dims 为 [1, 10, 8400] 的数组,这意味着 84000 个元素是以 10 个为一组的,每组有边界框的中心 x 和 y 坐标、边界框的宽高、6 个类别分别的置信度,一共 8400 组结果。
在以置信度 0.6 为阈值过滤掉置信度低的边界框后,我们还需要使用 IOU 作为 NMS 手段,来过滤掉重叠的边界框。
关于 IOU 和 NMS,可以参考这篇文章。简单来说,就是把两个框的面积加起来,再减去它们的重叠面积,得到实际占用面积,然后用重叠面积除以实际占用面积,得到 IOU。
我使用了一个非常简单的 NMS 实现,它把所有边界框按置信度排序,然后从高到低遍历,如果一个边界框的 IOU 大于 0.7,就认为它们是同一个物体,就把它过滤掉。
function nms(boxes: Box[], iouThreshold: number): Box[] {
// 1. Filter by confidence and sort in descending order
const candidates = boxes
.filter(box => box.confidence > 0.6)
.sort((a, b) => b.confidence - a.confidence)
const result: Box[] = []
while (candidates.length > 0) {
// 2. Pick the box with the highest confidence
const bestCandidate = candidates.shift()!
result.push(bestCandidate)
// 3. Compare with remaining boxes and remove ones with high IOU
for (let i = candidates.length - 1; i >= 0; i--) {
// The iou() function needs to be implemented separately, as described in the article.
if (iou(bestCandidate, candidates[i]) > iouThreshold) {
candidates.splice(i, 1)
}
}
}
return result
}可以在这里看整个 Playground 的源代码。
也可以在下面这个可视化组件游玩体验 IOU 和 NMS 的效果,通过拖动标签来改变框框位置:
box1y1: 100
box1y2: 300
box2y1: 150
box2y2: 350
发现的问题
在这么实践下来,我发现了几个问题:
- 无法识别非正方形图片:一旦遇到非正方形图片,模型输出的所有结果的置信度都会非常低,甚至为 0。
- 模型可以区分一级组装机和二级组装机,但是它会把箱子等方形物体也识别为组装机。
- 实际游戏中,机器贴图上往往会叠加一些状态标志,比如电力、现在的配方、使用的插件等,这些标志会干扰模型的识别。
最后
到了这里,就是我这个月来的成果了,收获颇丰啊,非常感谢 @nekomeowww 和 @dsh0416 和 makito 对我的帮助。接下来我该想办法提升一下模型性能,然后以某种方式让 AI 来控制游戏了。